The concept of Digital Twin is creating and maintaining a digital representation of the real physical entity and supporting its performance utilizing simulation and optimization tools, which are fed with the real data obtained from the physical equipment.
Development and implementation of the Digital Twin technology are one of the main challenges for today’s industry, and more detailed studies are needed on design methods for Digital Twins. The current research study by the Mechatronics and Autonomous Systems Research Group from Tallinn University of Technology (TalTech) presents a detailed structural description of the developed Digital Twin virtual entity and the development of a framework that allows Robot Operating System (ROS) to securely communicate with remote Digital Twins via the Internet and harness ROS’s adaptability across vast distances and multiple systems.
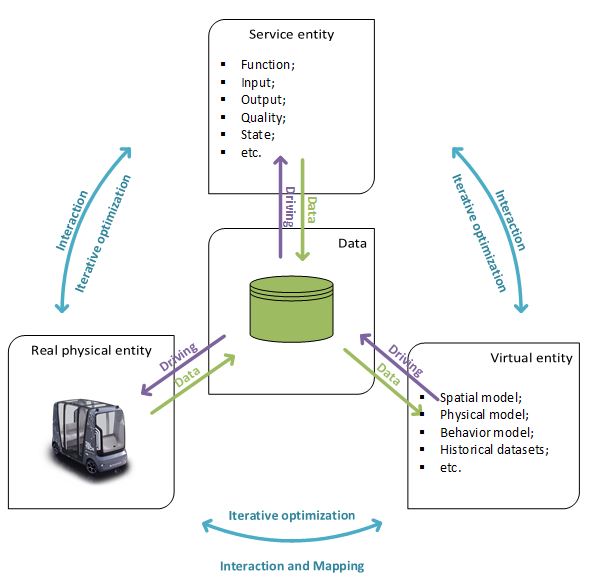
General Digital Twin architecture consists of at least three main components – the physical entity in the real world, its virtual entity (or virtual model(s)), and the data. Furthermore, all possible applications (services) of Digital Twin and interconnections between entities are often presented as separate parts, which makes reasonable a five-dimensional (5D) representation.
A real physical entity consists of various subsystems and sensory devices that work online. The virtual entity subsists of one or several models, and it can be the spatial, physical, numerical, behaviour, rule, or another model. The data entity contains various sets of data from the real physical entity obtained by implementing different sensors and data acquisition platforms already collected data. The service entity mainly includes regulation for virtual and physical entities and may carry several sub-services, such as maintenance and diagnostic, energy optimization, path planning, etc. High-quality simulations require a constant live link between data, virtual, physical, and service entities provided by connection entities.
There is no conventional methodology for Digital Twin (DT) development today, while the Digital Twin may include several physical or data-driven models. Creating and maintaining a digital representation of the real physical entity and supporting device performance using different simulation and optimization tools are critical goals of many research works. In the recent study by Prof Anton Rassõlkin et al., Unity3D is used for physics simulations and visualization of research team previous experience and high-quality documentation provided by software producers and the community. A detailed structural description of the virtual entity based on the Unity3D engine is presented. The research work considers obtained data required for the DT development and Unity3D-ROS interface that was one of the goals of this case study.
Future development includes improving the real-time collector from the physical and the ability to control studied system from online Digital Twin environment, and extended Digital Twin services entity. Moreover, the research team wants to enlarge the use case with other visualization tools similar and different from Unity3D to prove the modularity and flexibility of the middle layer.
A recent study presents a part of the project supported by the Estonian Research Council under the grant “Digital Twin for Propulsion Drive of Autonomous Electric Vehicle” that aimed to develop a specialized unsupervised prognosis and control platform for electric propulsion drive systems performance estimation of an autonomous self-driving electric vehicle. This goal requires the development of several subtasks and related objectives, one of them is to develop physical models of different energy system components (motors, gearboxes, power converters, etc.) and the related reduced models of these components (testbed), which will serve to construct the DT of the system.
Further information:
Professor Anton Rassõlkin
Tallinn University of Technology
anton.rassolkin@taltech.ee