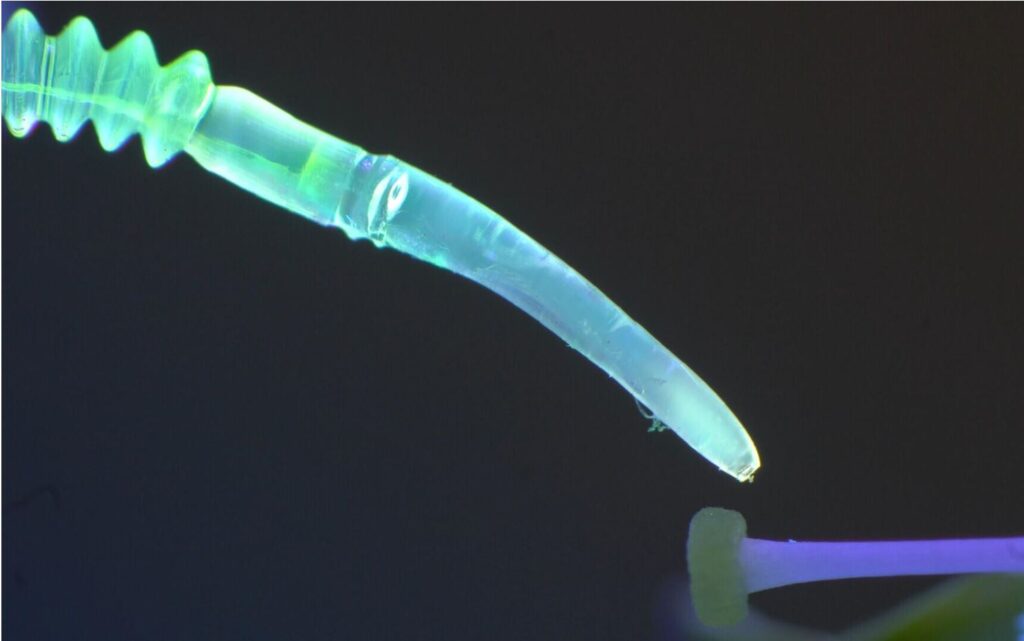
Soft robotics engineers at the University of Tartu are building a small robot that resembles a spider’s leg. The fingernail-long leg moves more flexibly than conventional robots. Inspired by nature, such dexterous movements could in the future help rescue people from danger zones and rubble.
Indrek Must, an associate professor of soft robotics at the institute of technology, keeps crickets in his office. Their movements and body structure are inspiring for soft robotics, but the real work is on a robot that mimics a spider. We specifically used the leg of the cucumber green spider, a common species in Estonia, as a model.
“These are pherobots (pheromone robots, ed.), inspired by the external skeleton of a spider. We took inspiration from nature, from the architecture of the spider,” Must said.
A spider, he said, is essentially a large container filled with liquid. “This container is then used to move around, so we mimicked one of the joints in the spider’s leg,” he explained.
His team, in collaboration with scientists from the Italian Institute of Technology‘s Bioinspired Soft Robotics research group, is now studying the fluids found in spiders’ bodies. A rigid exoskeleton covers the spider’s body, trapping the fluid inside while allowing for flexible movement. “It is this flexibility that we are after and which is lacking in robotics today,” he said.
“For bioinspiration, or inspiration from nature, it makes sense to look at what evolution has managed to achieve in its few billion years and take the best functional nuggets from there,” Kadri-Ann Valdur, a technology junior researcher, added. In other words, the working group is not trying to imitate a spider or some other species, but the idea, according to Valdur, is to find the most useful and exciting parts of each species and combine them with existing technical solutions.

Valdur 3D printed the outer skeleton of a robot leg during her internship at the Italian Institute of Technology. In addition to the exoskeleton, the foot has both a muscle that allows movement and a tendon that connects the muscle to the exoskeleton. Valdur claims that an electrolyte solution, which conducts electricity, connects all these parts. It is the solution that makes the robotic leg flexible and dexterous.
“Spiders are particularly adept at moving in nature and complex environments. Examples of complex environments include disaster areas and rubble. There, everything around you is constantly changing and has very different characteristics. It is the movement that uses the body that is effective,” Must said. A soft robot also has a smart body – the robot’s movement is a result of its own construction and composition.
“These are delicate situations: interactions with, for example, nets or natural objects such as flowers and flower buds,” Valdur said, referring to a specific model that Tartu is developing.
Indrek Must and Kadri-Ann Valdur published their research in the journal Advanced Functional Materials.

This article was originally published on the Estonian Public Broadcasting online news portal ERR – Novaator. Written in Estonian by Airika Harrik, it was later published in English, editor Kristina Kersa
Small robots are super interesting, aren’t they?! Read more from our webpage about How would a nanodrone be beneficial for inspecting crops?